









| FAQ #195 | |
   |
|
 |
What is a CAN bus and how does fitting a tow bar to a C6 affect things? |
 |
CAN stands for Control Area Network. It is a form of multiplexed wiring designed by Bosch and allows the linking of a number of control systems together, normally in a vehicle, so that they can share information. In the past it would have been necessary to have at least one wire for every signal on a vehicle making wiring looms bulky and expensive. CAN bus multiplexing allows a large number of signals to be transferred digitally using only a pair of twisted wires. Sharing of information on a CAN bus also reduces the number of sensors that are needed. For example the engine controller has its own sensor to monitor coolant temperature. Using CAN it can share the temperature reading so that the information is available to any other systems on the car that are interested. One such system might be the instrument cluster, which would use the information to drive its temperature gauge. CAN bus has been used in road cars for over 10 years. Starting at first with the high-end prestige vehicles, it is now commonplace in virtually all European cars and is becoming more popular in the US and Japan. While CAN bus is a very efficient way of connecting control units in a vehicle, it does present a problem to anyone fitting aftermarket equipment to a vehicle. This is because signals such as vehicle speed or RPM that used to be sent on separate wires can no longer be ‘tapped’ into directly. 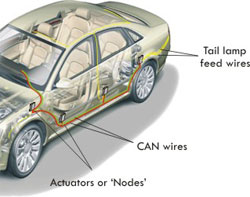 The idea behind CAN is simple. The idea behind CAN is simple. Instead of connecting everything to a central control unit through a main wiring harness, each component in the network has its own processing and communication capabilities, with one data channel connecting all units. In automotive CAN applications, the instrument panel, power windows, body accessories and even many sensors and actuators all have their own individual mini-control unit. All the units, called ‘nodes’, communicate with each other through a single pair of wires. These are twisted together to ensure minimum interference and is known as the ‘data bus’. All the data on the bus is addressed to a specific node or group of nodes by function, not location. The relevant nodes respond to a particular pre-programmed protocol. For example, the vehicle speed sensor will put its data on the bus, and every other control unit that needs vehicle speed information will receive it directly without having to go to the PCM (Pulse Code Modulator ) for a VSS ( Vehicle Speed Sensor ) signal. Because there are multiple nodes sharing a single bus, every date package includes a priority code. This will ensure, for instance, that if the ABS control unit and the lighting unit both send a message to the PCM, the critical ABS system message gets to go first. CAN technology will significantly reduce the number of connector pins and wires in the vehicle. With extra ‘blank’ connectors built into the network loop, or with a splice kit for adding connectors, nodes can be added on the production line (or even aftermarket) without running a new wiring harness. However, designers have built in more than one network on the vehicle, linked by ‘gateways’ where appropriate. The mission-critical nodes will be linked on a high-speed Class C network that can operate in virtual real-time. Less critical items, such as the instrument panel, lighting systems will use a slower Class B network, and ‘occasionally used’ body accessories, such as power windows are likely to use a Class A network. *Activated driver assistance systems inform the driver about all relevant data being transferred around the vehicle - the corresponding display is then activated either in the instrument display or on a centre panel display. Computers for engine and transmission control or for lighting system management monitor the vehicle using the data transmitted via the CAN bus. The systems no longer operate in isolation alongside one another, but can now quickly react to the information from one another. The CAN bus is an optimal solution for managing all vehicle electrical and electronic functions. As a result, effective fault monitoring and diagnosis of the systems are integrated into the CAN bus, defects can be localized more quickly and even temporarily compensated for by corresponding secondary systems. For example, a faulty tail light function can be temporarily replaced by a brake light bulb. The driver would instantly be informed of the failure in order to address the problem. *Activated driver assistance system is hugely relevant for the towing customer. Particular features such as TSP (Trailer stability program) now being introduced and currently installed in nearly ALL new VAG vehicles, BMW X series and the newly produced GM vehicles. The alarming thing about these systems, are that they are a incredibly easy feature to install and activate when towing. With a change to the existing ESP, ( Electronic Stability Program) the vehicle is able to correct a ‘snake’ in a trailer or caravan. These systems are dormant in the software of the vehicle and brought into operation when the car detects a trailer connected. How does the vehicle know a trailer is connected? This happens in a number of ways but the most common method is a signal generated by the towing module, which is recognised by the central computer. The signal is sent when a tow plug is inserted into the socket. Trailer Detection can also activate other features associated with towing. For systems such as TSP to operate it is essential to have a towbar wiring kit installation which communicates directly on the CAN bus. These WILL NOT function if a by-pass wiring system is installed. Trailer Detection. This is simply an element of a CAN protocol which is activated usually by the car acknowledging a trailer is connected. This is not done by any mechanical means, but by simply inserting the trailer plug into the towing socket. The car realises it has a trailer connected and now stimulates certain operating systems to wake up. These systems include: Trailer Stability Programs A change to the parameters of the vehicle’s Electronic Stability System - the car detects the ‘Snaking’ of a Trailer and by activating the ESP sensors in the vehicle, It brings the caravan back under control. C2 Function The C2 function of the trailer is activated, usually by a Double frequency flash rate of the car indicators, should a trailer indicator fault be detected. Fog lamp cut-off The rear fog lamp on the car is switched off when towing if a fog lamp is fitted to the trailer. PDC Cut-off If the vehicle is equipped with parking sensors these will be automatically turned off when a trailer is connected. The important features of these operations is that they DO NOT function if the car is fitted with by-pass technology used in towing electrics. They will only work when they detect a towing module which is sending and receiving signals through the CAN bus system. BigJohnD wrote ... It's about risk and preventative and post-incident actions. The presence of ESP and auto-activation of TSP when hooking up a trailer/caravan to monitor things like: differences in tyre circumference, steering wheel angle, battery voltage, clutch pedal sensor (for manuals), accelerator pedal position, engine speed, gearbox information, vehicle speed, Longitudinal acceleration, Lateral acceleration, roll angle, yaw, wheel speed sensors, electro-valve senors, brake fluid level, brake pressure and even the status of the handbrake. is the preventative part. The implementation of the system to stabilise the car's travel is post-incident part. To have all those inputs activating a system which responds as if no trailer is attached when there is, is too big a risk and could well be construed as contributory negligent by insurers, expert witnesses and courts. Most people seem to equate adding a tow bar to making sure the rear lights work. It's often forgotten than the whole dynamic of the forward motion is significantly altered. Citroën have gone to great lengths to ensure everyone's safety by incorporating a sophisticated vehicle stability management feature to reduce the risk of unwanted incidents. |
| Views | 4904 (Unique 3072) |
| Member Rating : |   8.5 - 4 votes 8.5 - 4 votes |
| FAQ Posted by | C6Dave |
| Info | Created: 07 October 2009 Last Updated: 18 December 2015 |
 Posted by Krtcho Posted by Krtcho Posted by Candide Posted by Krtcho Posted by Krtcho
Posted by Krtcho Posted by Krtcho Posted by Candide Posted by Krtcho Posted by Krtcho
Privacy Policy | Cookie Policy | Site Disclaimer | Contact Details | Sitemap | Quick Facts | Re Call Info | Downloads | Error Codes
| Site and Graphics created by: C6Dave Forum Icons by Axialis Emotes by Seb | 
|
